
Yleiskatsaus
Siltanosturi, joka tunnetaan yleisesti nimellä "ajo", on eräänlainen nostokone, jota käytetään laajalti teollisuus- ja kaivosyrityksissä, sen toimintamekanismi koostuu kolmesta pohjimmiltaan itsenäisestä ajojärjestelmästä, auton ajojärjestelmästä, koukkukäyttöjärjestelmästä, K-DRIVE-invertteristä edellä kolme ajojärjestelmää uudistettu onnistuneesti, seuraavassa kuvataan pääasiassa ajo ennen ja jälkeen kävelyjärjestelmän muutosprosessia.

Kaavio Edut
- Kenttäsuuntautunut virran avoimen silmukan vektoriohjaus, täysin irrotetut moottorimuuttujat, suuri matalataajuinen vääntömomentti, nopea vaste jne.;
- KD600 ottaa käyttöön PG-vapaan avoimen silmukan vektoriohjaustilan ja vektoroidun V/F-tilan ja vahvistaa ensimmäisen vaihteen tehotason konfiguraatiota;
- Taajuusalue: 0,5-600 Hz segmentin asetus, portaaton jatkuva säätö;
- Käyttöjännitealue: 380 V ± 20 %, ja väylän jännite putoaa välittömästi 360 VDC:iin häiriöttömän toiminnan takaamiseksi;
- Ylikuormituskapasiteetti: 150 % nimellisvirrasta, 1 minuutti sallittu; 200 % nimellisvirta, 1 s sallittu;
- Vääntömomenttiominaisuudet: käynnistysmomentti, yli 2 kertaa nimellisvääntömomentti; Matalataajuinen vääntömomentti, yli 1,6 kertaa nimellisvääntömomentti 1 Hz:llä; Jarrumomentti on suurempi kuin nimellismomentti.
Käyttöominaisuudet
- Nosturin nostomekanismilla on suuri käynnistysmomentti, joka yleensä ylittää 150 % nimellisvääntömomentista. Jos ylikuormitus ja muut tekijät otetaan huomioon, vähintään 200 % nimellisvääntömomentista on annettava käynnistys- ja kiihdytysprosessin aikana;
- Kun nostomekanismi pyörii alaspäin, moottori on regeneratiivisessa sähköntuotantotilassa ja sen täytyy olla energiankulutusjarrutus tai regeneratiivinen takaisinkytkentä verkkoon;
- Nostomekanismin kuormitus muuttuu dramaattisesti, kun nostettu esine lähtee tai koskettaa maata, ja taajuusmuuttajan tulee pystyä hallitsemaan iskukuormaa tasaisesti;
- Nosturin etu- ja takaajomekanismin asthe-ajonopeus ei ole suuri mekaanisen suunnittelun aikana, muuntajalla voidaan käyttää oikeaa ylinopeutta työtehokkuuden parantamiseksi.
Yksinkertainen kytkentäkaavio
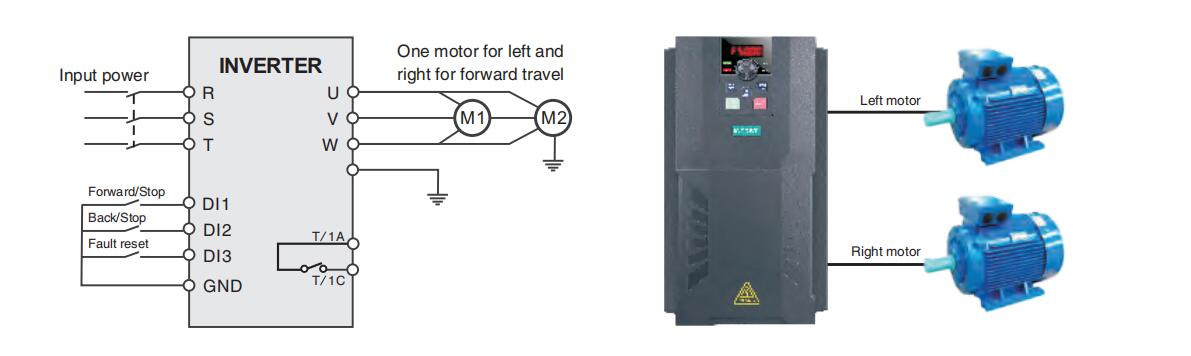
Parametri asetettung ja kuvaus(vasemman ja oikean moottorin ajoparametrit)
| Parametri | Selittää | Parametriasetus | Selittää |
| P0-00=0 | VF ohjaus | P5-00=1 | eteenpäin |
| P0-04=1 | Ulkoisen terminaalin käynnistyspysäytys | P5-01=2 | suorittaa myöhemmin |
| P0-06=1 | Digitaalinen taajuusasetus | P6-00=2 | Rele 1 vikalähtö |
| P0-14 = 60,00 | Maksimitaajuus | P4-01 = 1,6 kW | Kytketty moottorin teho |
| P0-16 = 60,00 | Taajuuden yläraja | P4-02=380V | Moottorin nimellisjännite |
| P0-11 = 60,00 | Digitaalinen asetustaajuus | P4-04=3,3A | Moottorin nimellisvirta |
| P0-23 = 3,0 s | Kiihtyvyysaika | P4-05 = 50 Hz | Moottorin nimellistaajuus |
| P0-24 = 2,0 s | Hidastusaika | P4-06=960R/min | Moottorin nimellisnopeus |
| Huomautus: Kun yhtä taajuusmuuttajaa käytetään kahden moottorin kanssa, on erittäin suositeltavaa asentaa vastaava lämpörele kunkin moottorin etupäähän jokaisen moottorin suojaamiseksi. | |||
Toiminnan vaikutusanalyysi
KD600-sarjan taajuusmuuttaja on suorittanut taajuusmuunnosmuunnoksen matkustavassa järjestelmässä, ja tr-muunnosvaikutus on suhteellisen ihanteellinen, pääasiassa:
- Pehmeä käynnistys ja pehmeä pysäytys käynnistyksen aikana toteutetaan, mikä vähentää vaikutusta sähköverkkoon;
- Taajuusmuuttajan käytön jälkeen alkuperäinen vaihtokontaktori ja nopeudensäätövastus jätetään pois, mikä ei ainoastaan säästä ylläpitokustannuksia, vaan myös vähentää huollon seisokkeja, mikä lisää tehoa;
- Kun pääkoukku toimii 5 Hz ~ 30 Hz, energiansäästövaikutus on erittäin ilmeinen;
- Taajuusmuuttajaa käytetään ohjaamaan etu- ja takaajoa, ja vasemman ja oikean kulkumekanismisarjat voivat toteuttaa ylitaajuuden työn. Turvallisuuden takaamisen edellytyksenä on, että työn tehokkuus paranee huomattavasti, ja myös liikkuvien laitteiden huoltotyökuormitus AC-kontaktorien tiheän vaihdon vuoksi vähenee.
Loppuhuomautukset
Taajuusmuuttajaa käytetään ohjaamaan etu- ja takakävelyä sekä vasenta ja oikeaa kävelymekanismisarjaa, joka voi toteuttaa ylikellotusta, parantaa huomattavasti työn tehokkuutta turvallisuuden takaamisen edellytyksenä ja vähentää myös ajolaitteiden huoltokuormaa. vaihtovirtakontaktorien toistuva vaihto.
Sovellussivusto

Postitusaika: 17.11.2023