
Yleiskatsaus
Yksipalkkitrukki on teollisuudessa yleisesti käytetty laite, jota käytetään tavaroiden liikkeen toteuttamiseen kolmiulotteisessa tilassa. Niistä vaakatason kahden suunnan toiminnan täydentää suuri, auto, pystysuora toiminnan suunta vastaa sähköisen nostomekanismin nostamisesta, sähkönostin on kaksinopeuksinen kartiomoottori, sähköinen ohjaustila on pohjimmiltaan AC-kontaktorin suorakäynnistys, iskuvirta on liian suuri, helppo vahingoittaa moottoria ja komponentteja, mekaanisten laitteiden käyttöikä lyhenee, huoltomäärä on suhteellisen suuri. Ja nopeudensäätöominaisuus on huono, virheenkorjaus ei ole tarpeeksi sujuvaa.
Sähköisen nostimen toiminnan ominaisuudet
Nosturin käynnistysmomentti on suuri, yleensä yli 150 % nimellisvääntömomentista, jos ylikuormitus ja muut tekijät otetaan huomioon, vähintään 200 % nimellisvääntömomentista tulisi antaa käynnistyskiihdytysprosessin aikana.
Kun nostomekanismi on käynnissä, moottori on regeneratiivisessa sähköntuotantotilassa ja siihen on kohdistettava energiankulutusjarrutus tai palautuva takaisinkytkentä verkkoon.
Nostomekanismin kuormitus muuttuu jyrkästi, kun nostopaino lähtee tai koskettaa maata, ja invertterin tulee pystyä hallitsemaan iskukuormaa tasaisesti.
KD600 invertterin ominaisuudet
- Magneettikenttäsuuntautunut virran avoimen silmukan vektoriohjaus, moottorin muuttujat ovat täysin irrotettuja, matalataajuinen vääntömomentti, nopea vastenopeus ja muut ominaisuudet;
- KD600 ottaa käyttöön PG-vapaan avoimen silmukan vektoriohjaustilan ja vektoroidun V/F-tilan suurentaakseen tehotasoa yhdellä askeleella;
- Taajuusalue: 0,5-600 Hz vaiheasetus, portaaton jatkuva säätö;
- Käyttöjännitealue: 380V±20%, väylän jännite välittömästi niinkin alhainen kuin 360VDC häiriötön toiminta;
- Ylikuormituskapasiteetti: 150 % nimellisvirta, odota 1 minuutti; 200 % nimellisvirta, 1 sekunti sallittu;
- Vääntömomenttiominaisuudet: käynnistysmomentti, yli 2 kertaa nimellisvääntömomentti; Matalataajuinen vääntömomentti, 1 Hz suurempi kuin 1,6 kertaa nimellisvääntömomentti; Jarrumomentti on suurempi kuin nimellisvääntömomentti.
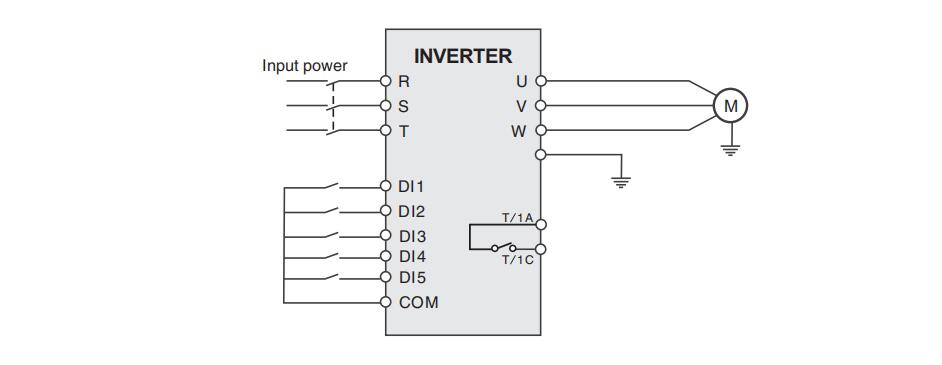
Yksinkertainen kytkentäkaavio
Viiteparametri Asetukset ja kuvaukset ovat seuraavat
| Toimintokoodi | Aseta arvo | Ohje | Huomautus |
| P0-03 | 1 | Vektoritila | |
| P0-04 | 1 | terminaalin ohjaus | |
| P0-06 | 4 | moninopeuksinen taajuus | |
| P0-23 | 3 | kiihtyvyysaika | |
| P0-25 | 5 | hidastusaika | |
| P6-00 | 32 | Jarrujen ohjaus | |
| B5-00 | 1 | Jarru päällä | |
| B5-01 | 2.5 | Vapauta jarrujen taajuus | |
| B5-04 | 1.5 | Jarrutustaajuus | |
| P4-01 | moottorin teho | ||
| P4-02 | moottorin jännite | ||
| P4-04 | moottorin nimellisvirta | ||
| P4-05 | moottorin nimellistaajuus | ||
| P4-06 | moottorin nopeus | ||
| P5-00 | 1 | Eteenpäin | |
| P5-01 | 2 | päinvastoin | |
| P5-02 | 12 | moninopeuksinen 1 | alhainen nopeus |
| P5-03 | 13 | moninopeuksinen 2 | keskinopeus |
| P5-04 | 14 | moninopeuksinen 3 | suuri nopeus |
| PC-01 | alhainen nopeus | ||
| PC-02 | keskinopeustaajuus | ||
| PC-04 | nopea taajuus |
Toiminnan vaikutusanalyysi
KD-sarjan invertterimuunnos ajojärjestelmän muunnos, muunnosvaikutus on ihanteellinen, pääasiassa:
- Pehmeä käynnistys ja pehmeä pysäytys toteutuvat käynnistettäessä, mikä vähentää vaikutusta sähköverkkoon.
- Taajuusmuuttajan käyttö alkuperäisen vaihtokontaktorin ja nopeusvastuksen eliminoimiseksi, eli huoltokustannusten säästämiseksi, mutta myös seisokkien huoltoajan lyhentämiseksi, mikä parantaa tehoa.
- Pääkoukulla, joka toimii taajuudella 5 Hz ~ 30 Hz, voi olla hyvin ilmeinen vaikutus.
- Paranna kenttäprosessia, säästä raaka-aineita;
Loppuhuomautukset
Taajuusmuuttajan käyttö etu- ja takaliikenteen sekä vasemman ja oikean liikemekanismisarjan ohjaamiseen voi saavuttaa ylitaajuuden, mikä parantaa huomattavasti työn tehokkuutta ja samalla varmistaa turvallisuuden ja vähentää myös vaihtovirtaa usein vaihdettaessa aiheutuvaa huoltotyötä. ajolaitteiden kontaktorit.
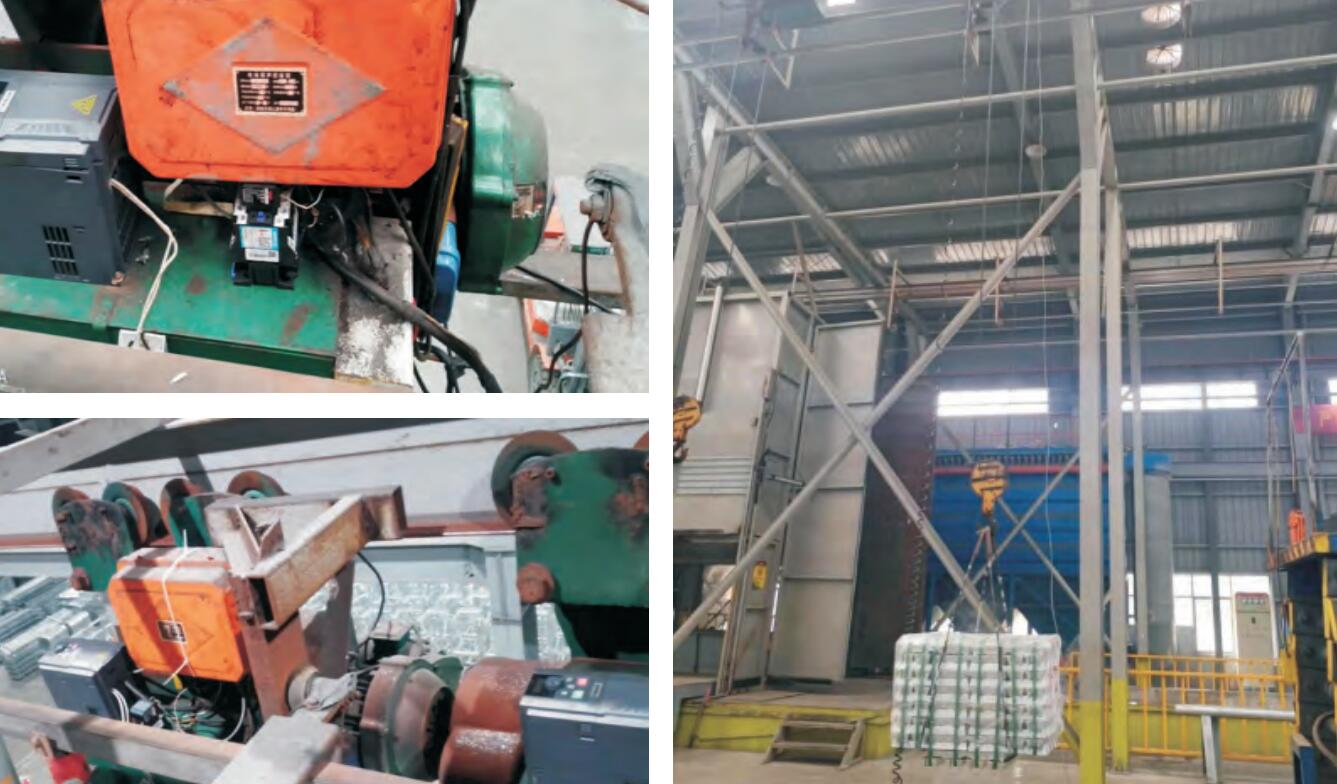
Sovellussivusto
Postitusaika: 17.11.2023